Die SilentStepSticks sind Hardware-/Pin-kompatibel mit StepStick und Pololu A4988 Treibern. Wobei die Trinamic TMCxxxx Treiber jedoch andere und weitere Einstellmöglichkeiten haben, die über die CFG/MS-Pins eingestellt werden können.
Die größte Kompatibilität zu einfachen Treibern (z.B. A4988 oder DRV8825) bietet der TMC2209, da die wichtigsten Einstellungen per Pin vorgenommen werden können.
Die Drehrichtung ist bei TMC2xxx SilentStepSticks invertiert (DIR-Pin invertiert) und kann entweder in der Software oder durch Drehen des Motorsteckers um 180° angepasst werden.
SilentStepSticks mit variabler Logikspannung (3-5V) erfordern besondere Sorgfalt bei den Versorgungsspannungen, weitere Informationen hier.
Für die meisten Fälle (mit Ausnahme eines direkt angetriebenen oder Bowden basierenden Extruders eines 3D-Druckers) eignet sich der nahezu geräuschlose stealthChop Modus. Wenn es Probleme wie Schrittverluste gibt, dann kann man eine langsamere Beschleunigung oder eine etwas höhere Stromeinstellung im stealthChop-Modus verwenden oder man kann den leistungsstärkeren und lauteren spreadCycle Modus verwenden.
Detaillierte Informationen zu den Betriebsarten: stealthChop (leise) and spreadCycle.
Weitere Informationen sind hier zu finden SilentStepStick Schaltpläne (PDF Dateien) and TMC2100 Datenblatt, TMC2130 Datenblatt, TMC2208 Datenblatt, TMC2209 Datenblatt, TMC5160 Datenblatt.
Der Motorstrom kann bei TMC2xxx SilentStepSticks mit Potentiometer über dieses eingestellt und über die Spannung am Vref Pin (0…2,5 V) nachgemessen werden.
Der maximal einstellbare Motorstrom beträgt 1,77A RMS für TMC21xx+TMC2209 SilentStepSticks und 1,64A RMS für TMC2208 SilentStepSticks.
Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71
Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax
Vref -> Spannung am Vref-Pin
Irms -> RMS (Root Mean Square) Strom pro Phase/Wicklung (Irms = Imax / 1.41)
Imax -> Maximaler Strom pro Phase/Wicklung (Imax = Irms * 1.41)
Immer für eine gute Luftzirkulation um den Treibern herum sorgen, damit die Wärme abgeführt werden kann.
TMC21x0/TMC2208: Ein kleiner Kühlkörper auf der oberen Leiterplattenseite ist für Ströme bis zu 850mA RMS geeignet. Für höhere Ströme einen Lüfter und einen Kühlkörper verwenden, der die Leiterplattenoberseite fast vollständig bedeckt.
TMC2209: Ein kleiner Kühlkörper auf der oberen Leiterplattenseite ist für Ströme bis zu 1A RMS geeignet. Für höhere Ströme einen Lüfter und einen Kühlkörper verwenden, der die Leiterplattenoberseite fast vollständig bedeckt.
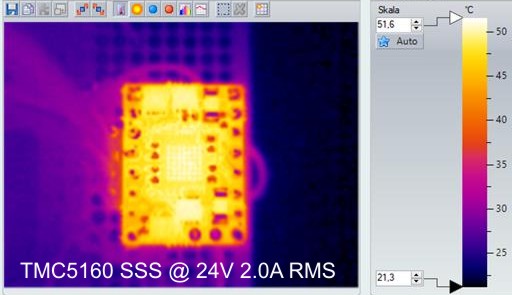
TMC5160: Für Ströme bis 2A RMS ist eine gute Luftzirkulation ausreichend und für höhere Ströme wird ein Lüfter benötigt. Beim TMC5160 müssen die externen MosFets und Shunt-Widerstände gekühlt werden. TMC5160 SilentStepStick thermisches Diagramm
Die SilentStepSticks verfügen über eine Standardschnittstelle mit Schritt- und Richtungseingang. Die Richtung wird mit dem DIR-Pin festgelegt und bei jedem Impuls am STEP-Pin bewegt sich der Motor einen Schritt. Hier sind Arduino Beispiele und eine Arduino Bibliothek (interface=DRIVER) zu finden.
Yes, because the Trinamic TMCxxxx drivers use a chopper drive circuit to generate a constant current in each winding (motor phase) rather than applying a constant voltage.
The motor supply voltage has to be also a few times higher than the motor phase/coil voltage. Otherwise the torque at higher speeds can not be achieved.
So it is recommended to use motors with a low phase voltage below 4V (V = I * R).
Guide: Choosing stepper motors.
A power supply (Psup) with a few times higher voltage than the motor phase voltage and a current of roughly the power of the motor (Pmot) plus the mechanical output power (Pout) is at least needed.
For example 3 stepper motors with 2 coils/phases and every phase has a resistance (R) of 2.2 Ohm and a current rating (I) of 1.8 A .
The phase resistance can be also calculated from the phase voltage (U) with R = U / I, e.g. 4 V / 1.8 A = 2.2 Ohm.
In general stepper motors are not driven with the maximum current and so the calculation is done with 50% of the rated current: 0.9 A.
R = 2.2 OhmI = 0.9 A (50% von 1.8 A)U = R * I = 2.2 Ohm * 0.9 A = 2.0VPmot = 2 Wicklungen * U * I = 2 * 2.0V * 0.9A = 3.6W (Leistung im Stillstand ohne Last)
Pout = 0.20Nm * (2pi * 1000U/min / 60) = 20.9W (mechanische Leistung)
Psup = 3 Motoren * (Pmot + Pout) = 3 * (3.6W + 20.9W) = 73.5W (elektrische Eingangsleistung)
Bei 24V (Usup) ist dies ein Strom von 3.1A (I = Psup / Usup = 73.5W / 24V).
Wenn der Motor in Bewegung ist, darf die Stromversorgung nicht abgeschaltet werden. Stellen Sie immer sicher, dass der Motor still steht und die Motorausgänge beim Ausschalten deaktiviert sind, ansonsten kann der Treiber-IC beschädigt werden (aufgrund von Induktionsspannungen). Ein Not-Aus kann realisiert werden in dem der EN-Pin auf VIO (High) gesetzt wird. Dies schaltet alle Motorausgangstreiber aus und versetzt den Motor in den Freilauf.
Beim Einschalten muss zuerst die Motorversorgungsspannung VM und dann die Logikversorgungsspannung VIO vorhanden sein oder gleichzeitig. Beim Ausschalten muss zuerst die Logikspannungsversorgung VIO und dann die Motorversorgungsspannung VM abgeschaltet werden, weil die interne Logik des TMCxxxx-Treibers von VM versorgt wird. Um die korrekte Stromversorgung zu gewährleisten, kann eine Schottky-Diode von VIO (Anode) nach VM (Kathode) geschaltet werden. Die v2 Protektoren für SilentStepSticks enthalten diese Schottky-Diode.
Es ist keine spezielle Ein- oder Ausschaltsequenz erforderlich. Wenn der SilentStepStick nur mit 5V (Logik) versorgt wird, dann kann ein Strom nach VM zurückfließen. In diesem Fall darf der Treiber (Motorausgänge) nicht aktiviert werden und es sollten keine Lasten (z.B. Lüfter) an VM (<=4V) anliegen, da der Strom von der Logikversorgungsspannung VIO bezogen wird.
The SilentStepSticks with a variable logic voltage (VIO) of 3-5V use the internal linear regulator of the TMCxxxx to generate from the motor supply voltage (VM) a 5V voltage for the internal digital and analog circuit (about 20mA). Because it is a linear voltage regulator the power dissipation depends on the motor supply voltage (high voltage = high power dissipation/heat). The 5V logic SilentStepSticks do not use the internal voltage regulator of TMCxxxx and therefor only a 5V supply voltage for VIO is possible and VM has not to be present before VIO. Further information about power-up and down can be found here.
Verlustleistung des internen Spannungsreglers von TMC21xx Treibern:
The configuration for TMC2130 in standalone mode (SPI jumper closed) is set via the CFG pins like the TMC2100. On the TMC2100 SilentStepSticks the CFG0 pin is set to GND as default and this sets the chopper off time to 140 Tclk (most universal choice). In contrast on the TMC2130 SilentStepSticks the CFG0 pin (also SDO) is open as default and this sets the chopper off time to 332 Tclk. On the TMC2130 SilentStepSticks the CFG3 pin is also connected to the pin header and should be left unconnected/open (external reference voltage on AIN) in standalone mode.
Es ist möglich, die CFG-Pins von zwei oder mehr Treibern zu verbinden. Jedoch kann dann der Pinzustand nur GND (low) oder VIO (high) sein. Der unbeschaltete Zustand (offen) von TMC21xx-Treibern ist in dieser Konfiguration nicht möglich.
Der TMC2xxx Chip hat auf der Unterseite ein Wärmeleitpad, das mit der Leiterplatte verlötet ist. Der Wärmewiderstand über die Chipunterseite ist daher besser als über die Chipoberseite und die Wärme steigt nach oben. Deshalb befindet sich der Chip auf der Platinenunterseite und ein Kühlkörper kann direkt auf die Leiterplattenoberseite montiert werden. Weitere Informationen hier.
Bei SilentStepStick Treibern mit Potentiometer lässt sich dieses durch eine Bohrung in der Platine von oben her einstellen.
Eine Motorversorgungsspannung von 12V ist in den meisten Fällen zu niedrig und im Allgemeinen werden die Geräusche leiser, wenn die Motorversorgungsspannung über 18V liegt. Das Geräusch hängt auch von den verwendeten Schrittmotoren ab. Wir empfehlen Motoren mit einer Phasenspannung <=4V und einer Induktivität <=4mH. Anleitung: Choosing stepper motors, Troubleshooting by Alex Kenis.
Der nahezu geräuschlose Betriebsmodus ist stealthChop.
Bei Problemen zuerst die Verkabelung und die Stromversorgung (Spannungen und Schutz gegen Spannungsspitzen beim Einschalten) überprüfen.
Wenn dies in Ordnung ist, den Widerstand messen (wenn der Treiber nicht angeschlossen ist) von der Logikspannungsversorgung VIO gegen GND, von den digitalen Pins EN, DIR, STEP gegen GND + VIO und von den Motoranschlüssen M1A, M1B, M2A, M2B gegen GND + VM. Wenn der Widerstand der Logikspannungsversorgung oder eines Digitaleingangs sehr niedrig ist (<10 kOhm), liegt im Allgemeinen ein Problem mit der Ein- oder Ausschaltsequenz der Versorgung vor. Oder wenn der Widerstand eines Motoranschlusses sehr niedrig ist (<100 kOhm), liegt möglicherweise ein Problem mit der Motorverkabelung (loser Kontakt) vor oder die Motorstromversorgung wurde während des Betriebs (in Bewegung) entfernt. Aufgrund von Induktionsspannungen durch die elektromotorische Rückkraft (EMK/EMF) können die Motorausgangstreiber beschädigt werden, wenn die Motorstromversorgung oder der Motor während des Betriebs entfernt wird.
{kind=link}